F. Auricchio, M. Carraturo, G. Toscani, M. Zanella.
Disc. Cont. Dyn. Syst. – S, 17(1):78-97, 2024. (Preprint arXiv)
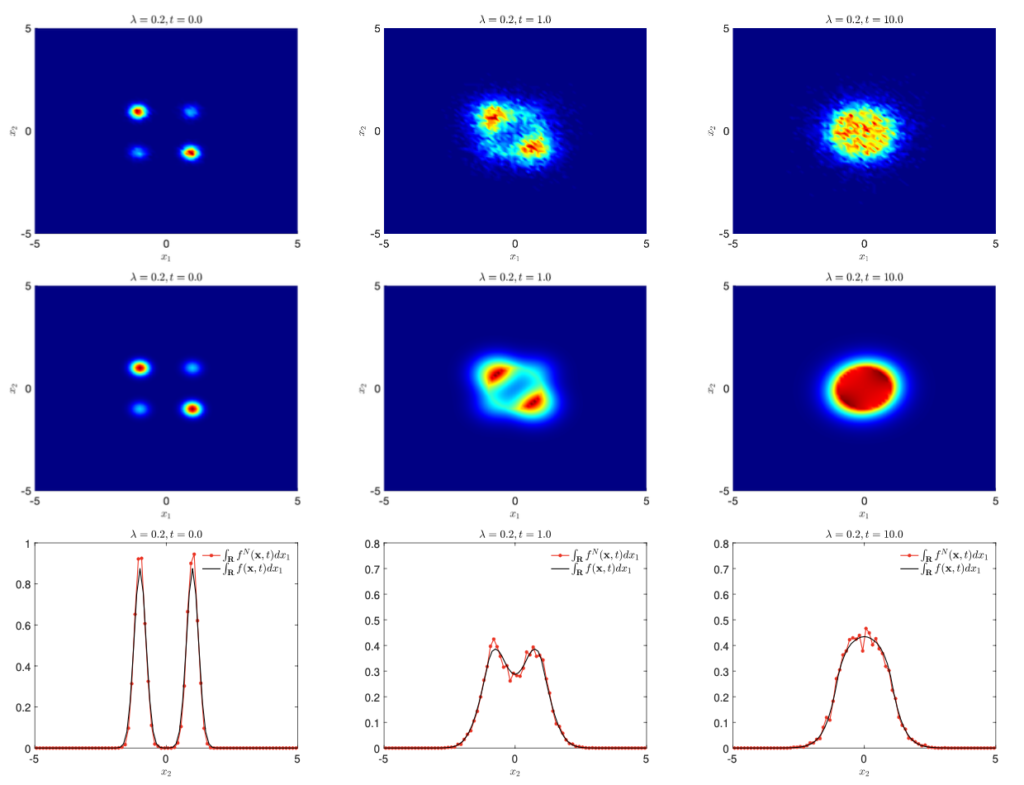
We study the large time behavior of a system of interacting agents modeling the relaxation of a large swarm of robots, whose task is to uniformly cover a portion of the domain by communicating with each other in terms of their distance.
To this end, we generalize a related result for a Fokker-Planck-type model with a nonlocal discontinuous drift and constant diffusion, recently introduced by three of the authors, of which the steady distribution is explicitly computable. For this new nonlocal Fokker-Planck equation, existence, uniqueness and positivity of a global solution are proven, together with precise equilibration rates of the solution towards its quasi-stationary distribution. Numerical experiments are designed to verify the theoretical findings and explore possible extensions to more complex scenarios.