A. Medaglia, G. Nastasi, V. Romano, M. Zanella
Preprint arXiv, 2024.
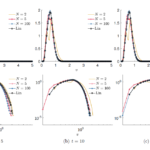
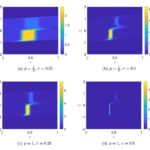
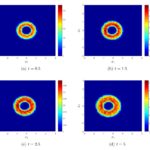
In this article, we investigate some issues related to the quantification of uncertainties associated with the electrical properties of graphene nanoribbons. The approach is suited to understand the effects of missing information linked to the difficulty of fixing some material parameters, such as the band gap, and the strength of the applied electric field. In particular, we focus on the extension of particle Galerkin methods for kinetic equations in the case of the semiclassical Boltzmann equation for charge transport in graphene nanoribbons with uncertainties. To this end, we develop an efficient particle scheme which allows us to parallelize the computation and then, after a suitable generalization of the scheme to the case of random inputs, we present a Galerkin reformulation of the particle dynamics, obtained by means of a generalized polynomial chaos approach, which allows the reconstruction of the kinetic distribution. As a consequence, the proposed particle-based scheme preserves the physical properties and the positivity of the distribution function also in the presence of a complex scattering in the transport equation of electrons. The impact of the uncertainty of the band gap and applied field on the electrical current is analyzed.
 Giuseppe Toscani, Andrea Tosin, Mattia Zanella
Giuseppe Toscani, Andrea Tosin, Mattia Zanella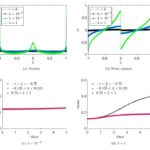
 José Antonio Carrillo, Lorenzo Pareschi, Mattia Zanella.
José Antonio Carrillo, Lorenzo Pareschi, Mattia Zanella.