
A. Bondesan, A. Piralla, E. Ballante, A. M. G. Pitrolo, S. Figini, F. Baldanti, M. Zanella
Preprint arXiv, 2024.
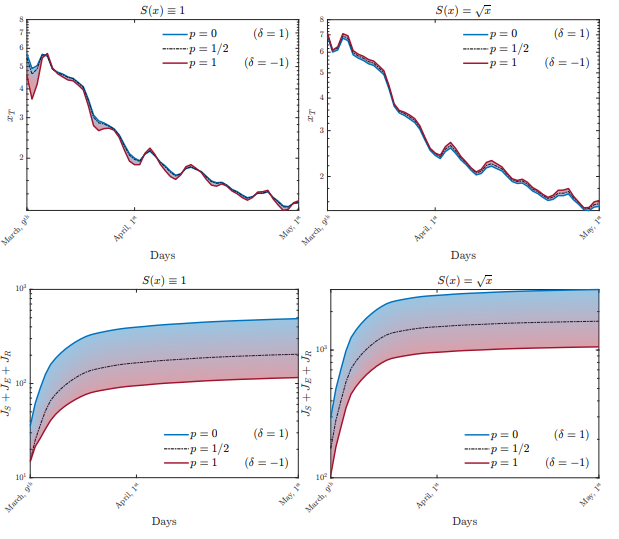
A pipeline to evaluate the evolution of viral dynamics based on a new model-driven approach has been developed in the present study. The proposed methods exploit real data and the multiscale structure of the infection dynamics to provide robust predictions of the epidemic dynamics. We focus on viral load kinetics whose dynamical features are typically available in the symptomatic stage of the infection. Hence, the epidemiological evolution is obtained by relying on a compartmental approach characterized by a varying infection rate to estimate early-stage viral load dynamics, of which few data are available. We test the proposed approach with real data of SARS-CoV-2 viral load kinetics collected from patients living in an Italian province. The considered database refers to early-phase infections, whose viral load kinetics are not affected by mass vaccination policies in Italy. Our contribution is devoted to provide an effective computational pipeline to evaluate in real time the evolution of infectivity. Comprehending the factors influencing the in-host viral dynamics represents a fundamental tool to provide robust public health strategies. This pilot study could be implemented in further investigations involving other respiratory viruses, to better clarify the process of viral dynamics as a preparatory action for future pandemics.
 M. Azzi, C. Bardelli, S. Deandrea, G. Dimarco, S. Figini, P. Perotti, G. Toscani, M. Zanella
M. Azzi, C. Bardelli, S. Deandrea, G. Dimarco, S. Figini, P. Perotti, G. Toscani, M. Zanella