
J. Franceschi, L. Pareschi, M. Zanella
ESAIM: Control, Optimisation and Calculus of Variations, in press. (Preprint arXiv)
Consensus-based optimization (CBO) is a class of metaheuristic algorithms designed for global optimization problems. In the many-particle limit, classical CBO dynamics can be rigorously connected to mean-field equations that ensure convergence toward global minimizers under suitable conditions.
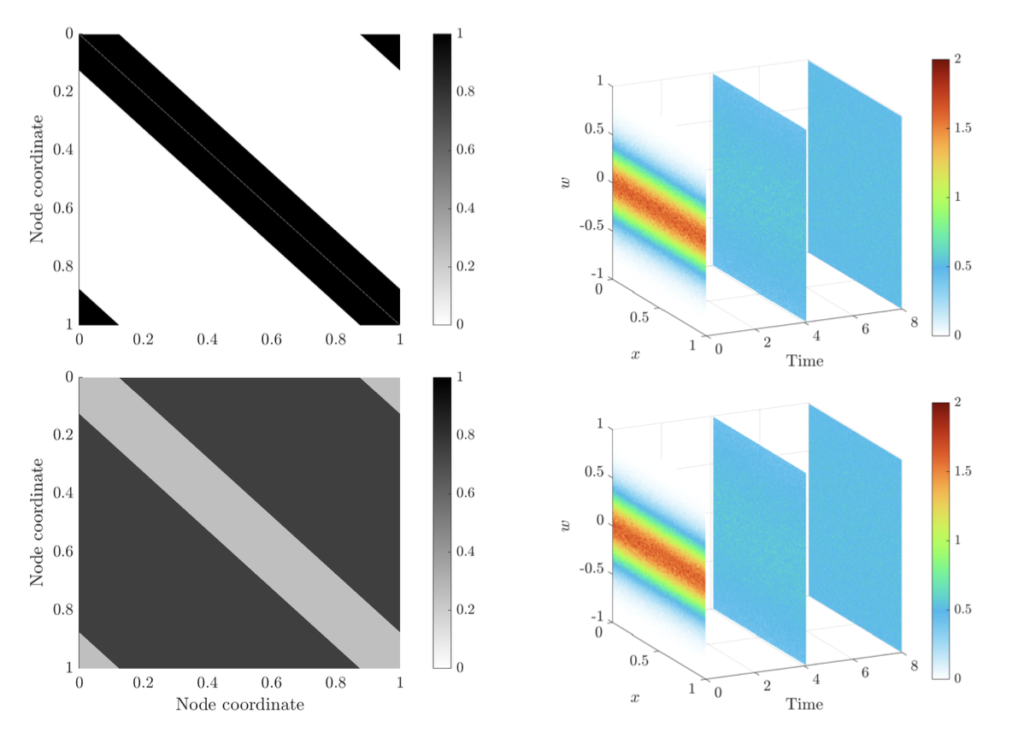
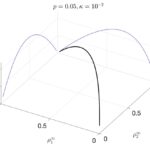
In this work, we draw inspiration from recent extensions of the Kaniadakis–Quarati model for indistinguishable bosons to develop a novel CBO method governed by a system of SDEs with superlinear drift and nonconstant diffusion. The resulting mean-field formulation in one dimension exhibits condensation-like phenomena, including finite-time blow-up and loss of L2-regularity. To avoid the curse of dimensionality a marginal based formulation which permits to leverage the one-dimensional results to multiple dimensions is proposed. We support our approach with numerical experiments that highlight both its consistency and potential performance improvements compared to classical CBO methods.



 R. Borsche, A. Klar, M. Zanella
R. Borsche, A. Klar, M. Zanella