L. Pareschi, T. Trimborn, M. Zanella
International Journal for Uncertainty Quantification, 12(1): 61-84, 2022. (Preprint arXiv)
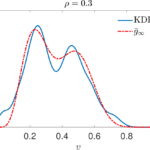
In this paper, we extend a recently introduced multi-fidelity control variate for the uncertainty quantification of the Boltzmann equation to the case of kinetic models arising in the study of multiagent systems. For these phenomena, where the effect of uncertainties is particularly evident, several models have been developed whose equilibrium states are typically unknown. In particular, we aim to develop efficient numerical methods based on solving the kinetic equations in the phase space by Direct Simulation Monte Carlo (DSMC) coupled to a Monte Carlo sampling in the random space. To this end, exploiting the knowledge of the corresponding mean-field approximation we develop novel mean-field Control Variate (MFCV) methods that are able to strongly reduce the variance of the standard Monte Carlo sampling method in the random space. We verify these observations with several numerical examples based on classical models , including wealth exchanges and opinion formation model for collective phenomena.
 G. Albi, L. Pareschi, M. Zanella
G. Albi, L. Pareschi, M. Zanella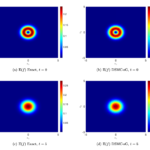
 Michael Herty, Andrea Tosin, Giuseppe Visconti, Mattia Zanella
Michael Herty, Andrea Tosin, Giuseppe Visconti, Mattia Zanella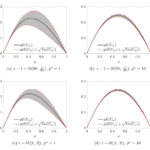 Andrea Tosin, Mattia Zanella
Andrea Tosin, Mattia Zanella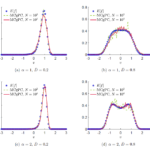

 José Antonio Carrillo, Lorenzo Pareschi, Mattia Zanella.
José Antonio Carrillo, Lorenzo Pareschi, Mattia Zanella.
 Andrea Tosin, Mattia Zanella.
Andrea Tosin, Mattia Zanella.