M. Zanella
Preprint arXiv, 2024
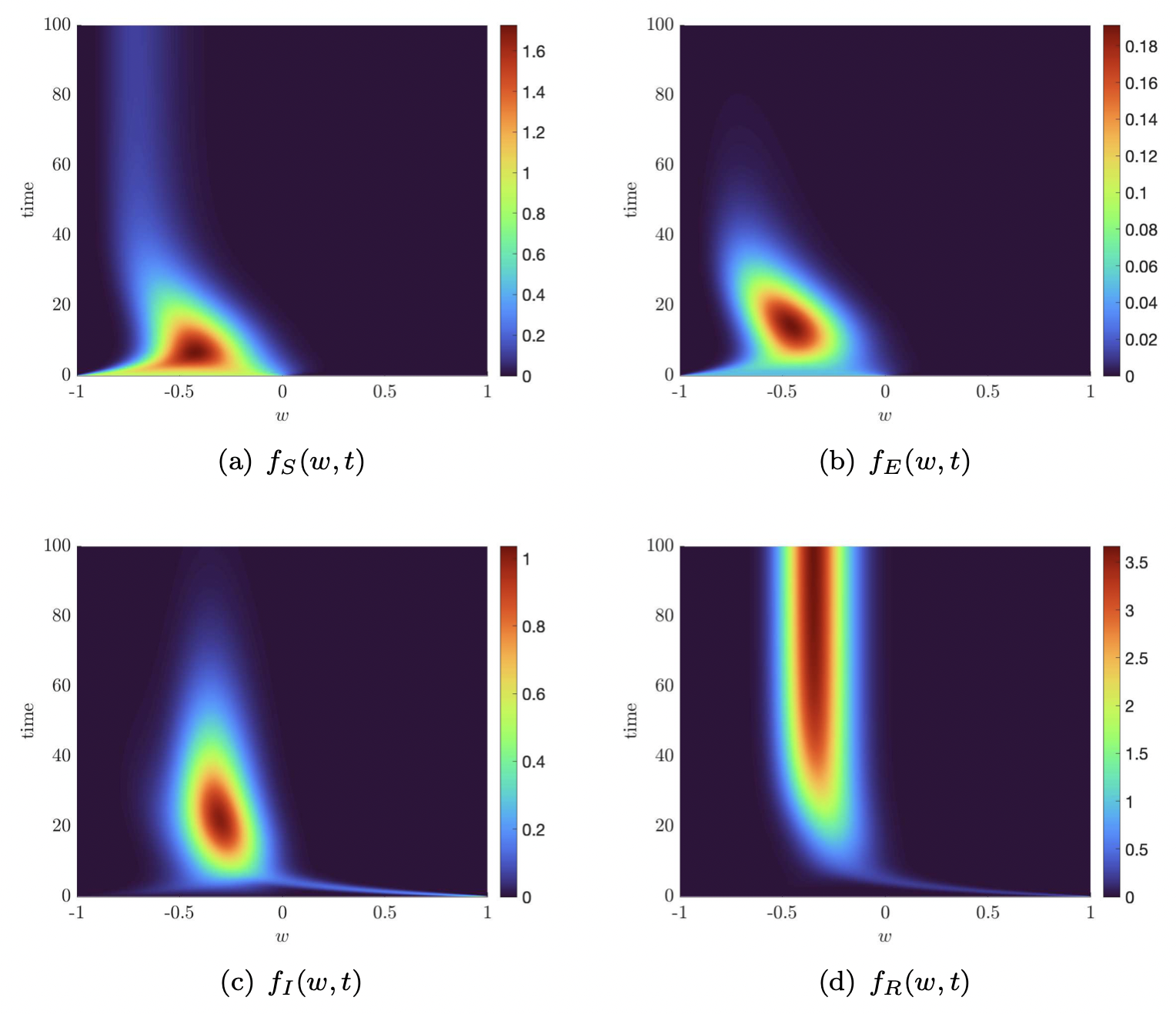
We present a systematic review of some basic results on the derivation of classical epidemiological models from simple agent-based dynamics. The evolution of large populations is coupled with the dynamics of the contact distribution, providing insights into how individual behaviors impact macroscopic epidemiological trends.
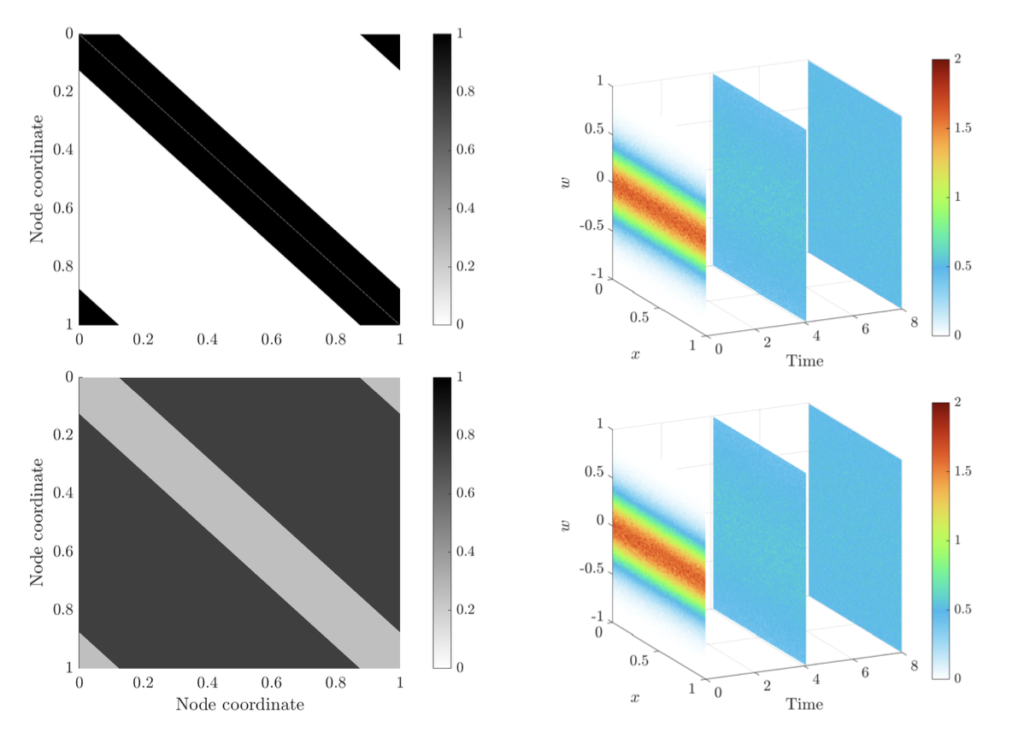
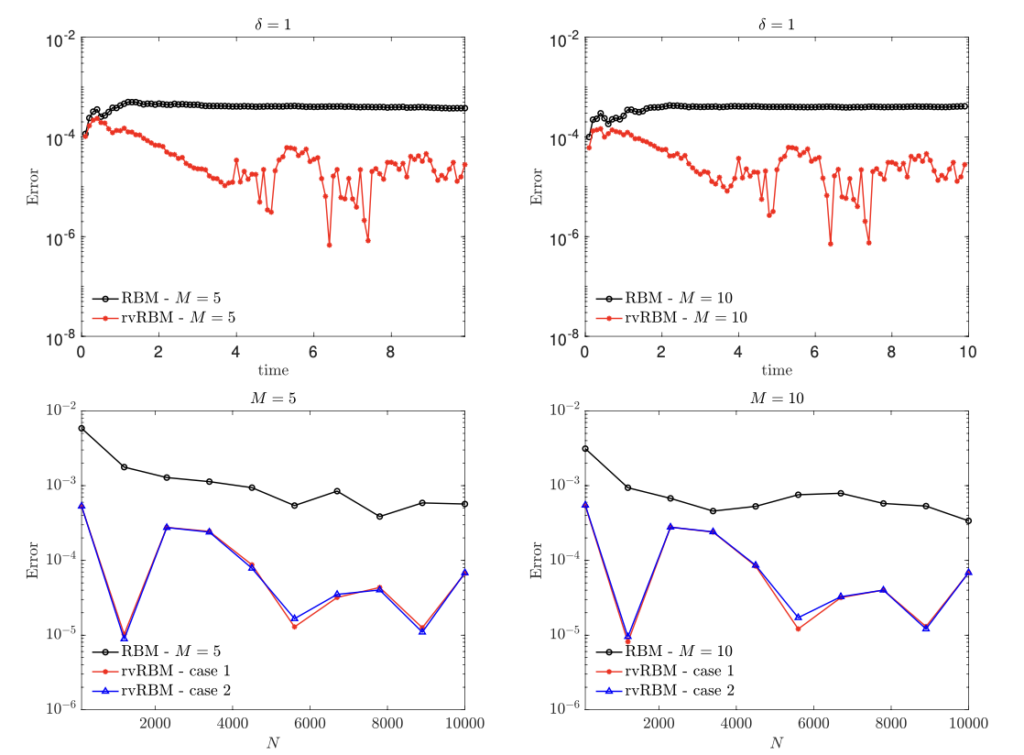
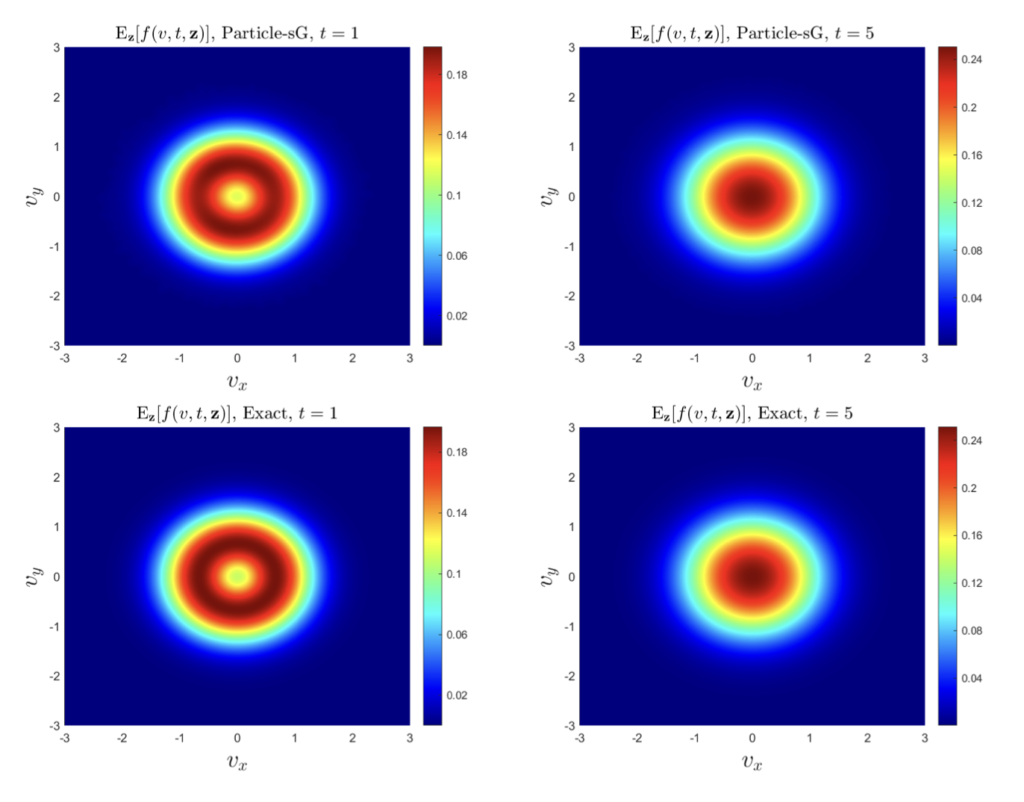
The resulting set of equations incorporates local characteristics of the operator governing the emergence of a family of contact distributions. To validate the proposed approach, we provide several numerical results based on asymptotic preserving methods, demonstrating their effectiveness in capturing the multi-scale nature of the problem and ensuring robust performance across different regimes.